publications
2025
- Science Robotics
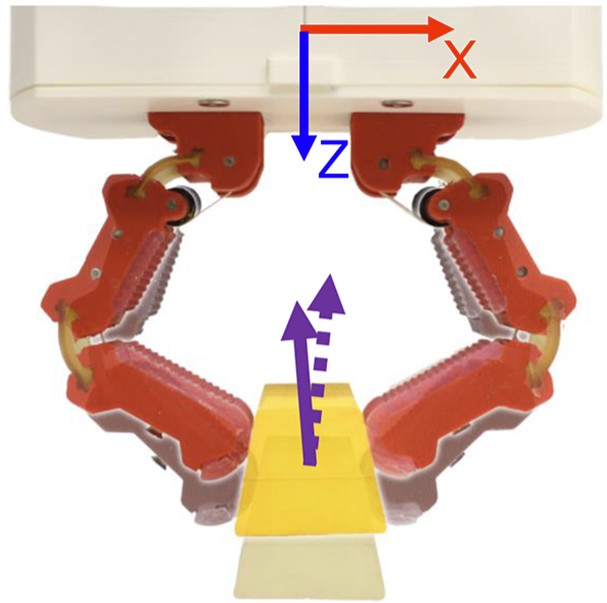 Forces for Free: Vision-Based Contact Force Estimation with a Compliant HandScience Robotics, 2025
Forces for Free: Vision-Based Contact Force Estimation with a Compliant HandScience Robotics, 2025
2024
- IJSR
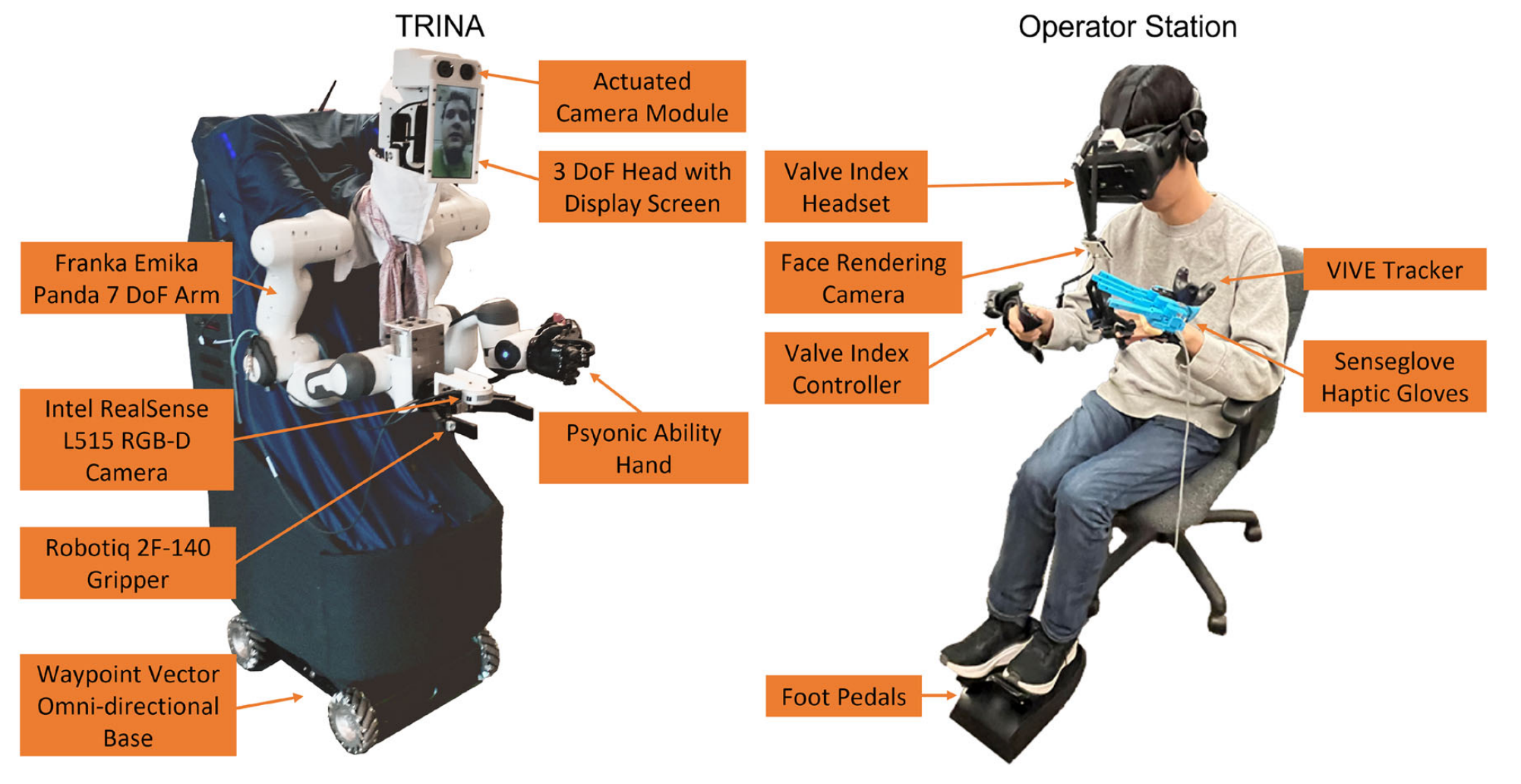 Immersive Commodity Telepresence with the Avatrina Robot AvatarInternational Journal of Social Robotics (IJSR), 2024
Immersive Commodity Telepresence with the Avatrina Robot AvatarInternational Journal of Social Robotics (IJSR), 2024 - AIAA SciTechLearning and Autonomy for Extraterrestrial Terrain Sampling: An Experience Report from OWLAT DeploymentIn AIAA SCITECH 2024 Forum, 2024
- arXiv

2023
- R:SS WorkshopPan-Tilt-Roll Televisualization With Adjustable Baseline StereoIn ICRA 2023 2nd Workshop Toward Robot Avatars, 2023
- ICRA WorkshopCommodity Telepresence with the AvaTRINA Nursebot in the ANA Avatar XPRIZE FinalsIn ICRA 2023 2nd Workshop Toward Robot Avatars, 2023
2022
- IROSExcavation of Fragmented Rocks with Multi-modal Model-based Reinforcement LearningIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
- RA-L
 Automated Heart and Lung Auscultation in Robotic Physical ExaminationsIEEE Robotics and Automation Letters (RA-L), 2022
Automated Heart and Lung Auscultation in Robotic Physical ExaminationsIEEE Robotics and Automation Letters (RA-L), 2022 - RA-LExcavation Reinforcement Learning Using Geometric RepresentationIEEE Robotics and Automation Letters (RA-L), 2022
- R:SS WorkshopCommodity telepresence with the AvaTRINA nursebot in the ANA Avatar XPRIZE semifinalsIn R:SS 2022 Workshop on Towards robot avatars: perspectives on the ANA Avatar XPRIZE competition, 2022
2021
- ICRA
 Contact-Implicit Trajectory Optimization With Learned Deformable Contacts Using Bilevel OptimizationIn IEEE International Conference on Robotics and Automation (ICRA), 2021
Contact-Implicit Trajectory Optimization With Learned Deformable Contacts Using Bilevel OptimizationIn IEEE International Conference on Robotics and Automation (ICRA), 2021 - ICRA WorkshopInformative path planning for automatic robotic auscultationIn ICRA 2021 Workshop on Impact of COVID-19 on Medical Robotics and Wearables Research, 2021
- ICRAA Novel Robotic System for Ultrasound-guided Peripheral Vascular LocalizationIn IEEE International Conference on Robotics and Automation (ICRA), 2021
2020
- ICRA
 Semi-Empirical Simulation of Learned Force Response Models for Heterogeneous Elastic ObjectsIn IEEE International Conference on Robotics and Automation (ICRA), 2020
Semi-Empirical Simulation of Learned Force Response Models for Heterogeneous Elastic ObjectsIn IEEE International Conference on Robotics and Automation (ICRA), 2020
2019
- ICRA
 A Data-driven Approach for Fast Simulation of Robot Locomotion on Granular MediaIn International Conference on Robotics and Automation (ICRA), 2019
A Data-driven Approach for Fast Simulation of Robot Locomotion on Granular MediaIn International Conference on Robotics and Automation (ICRA), 2019