Welcome to the Adaptive Robotics Lab at UIC!
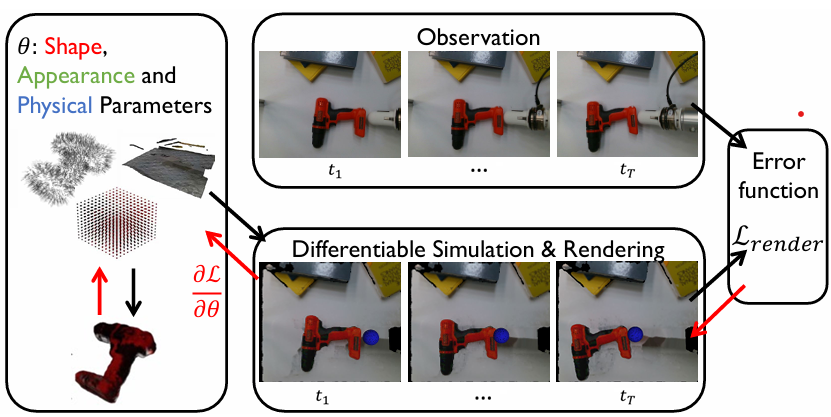
We aim to develop fundamental technologies that enable robots to understand their contacts with the external world from proactive interactions and perform meaningful tasks. Our research topics include physics-based perception/world modeling, active learning, and contact-rich manipulation planning. Applications of our research include construction, nursing, healthcare, and scientific exploration.
Prospective students: Please see the prosective student page for more information.
news
| Sep 17, 2025 | Prof. Yifan Zhu gave a talk at the Utah Robotics Seminar! |
|---|---|
| Aug 16, 2025 | Our lab is officially launched at UIC, with two PhD students Juneil Park and Fuquan Wang! |
selected publications
- Science Robotics
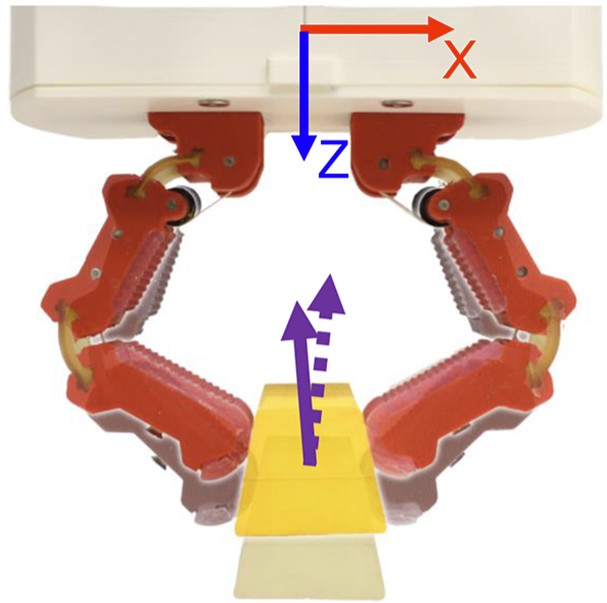 Forces for Free: Vision-Based Contact Force Estimation with a Compliant HandScience Robotics, 2025
Forces for Free: Vision-Based Contact Force Estimation with a Compliant HandScience Robotics, 2025 - IJSR
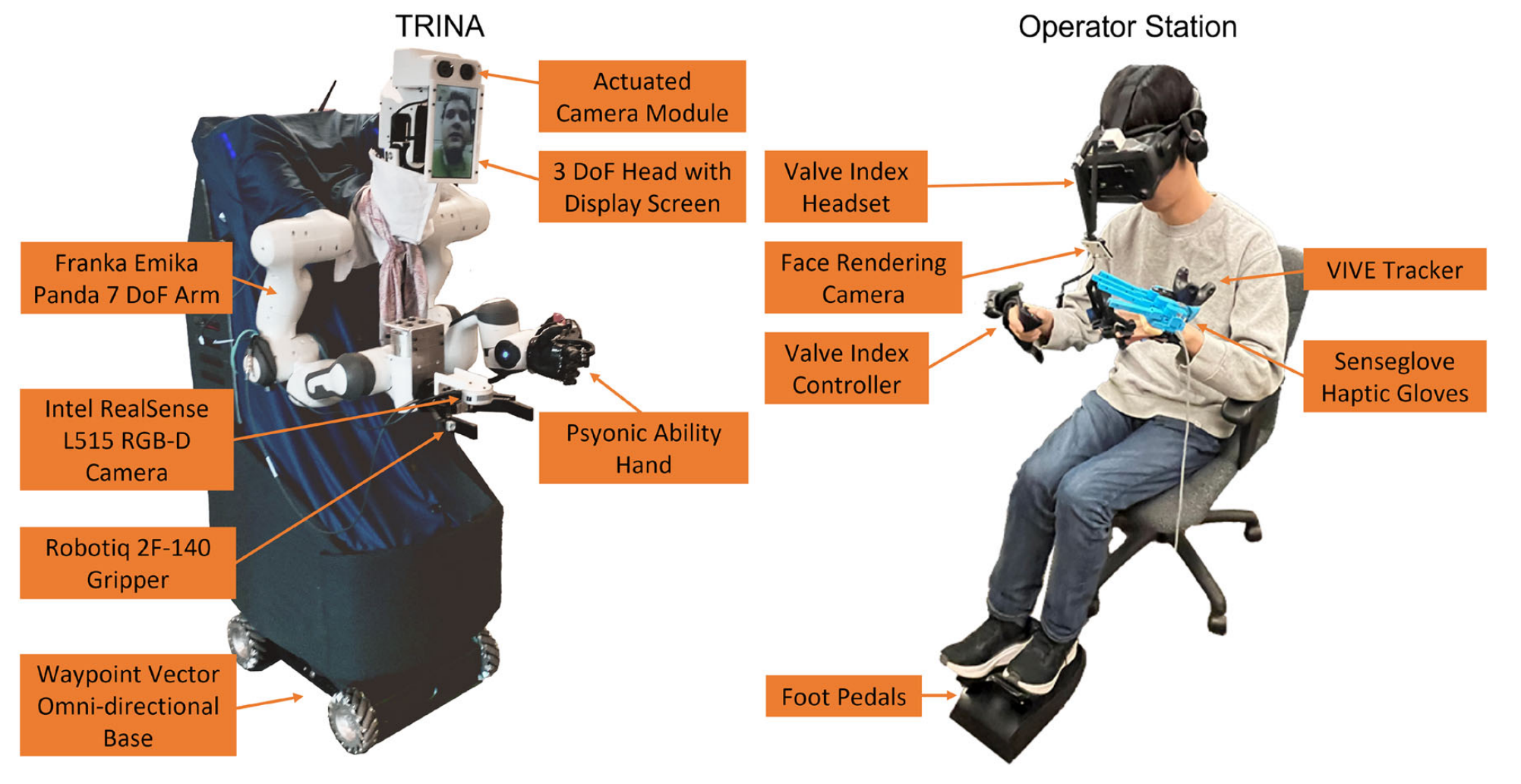 Immersive Commodity Telepresence with the Avatrina Robot AvatarInternational Journal of Social Robotics (IJSR), 2024
Immersive Commodity Telepresence with the Avatrina Robot AvatarInternational Journal of Social Robotics (IJSR), 2024 - ICRA
 A Data-driven Approach for Fast Simulation of Robot Locomotion on Granular MediaIn International Conference on Robotics and Automation (ICRA), 2019
A Data-driven Approach for Fast Simulation of Robot Locomotion on Granular MediaIn International Conference on Robotics and Automation (ICRA), 2019